Key Features Of The DeltaQuad Pro
Commercial-grade Fixed Wing platform packed with smart technology
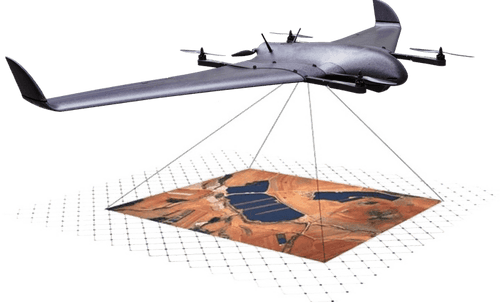
The DeltaQuad Pro is the most powerful VTOL (Vertical Takeoff and Landing) drone on the market.
This commercial-grade platform is packed with smart technology to maximise commercial drone operations, providing high efficiency, accurate data collection and incredible endurance.
High Endurance
Up to 150km of airtime using the Auxiliary Battery option, or up to 100km with a 1.2kg payload. Dependant on payload, DeltaQuad can fly for almost two hours.
Wide Payload Compatibility
Compatible with a range of quality, mission-specific payloads, such as the 61MP Sony A7R mark IV for aerial surveying or the Micasense Altum for agriculture.
Fully Autonomous
Conduct fully-autonomous missions, even beyond communication range.
Long-range Communication
Up to 50KM radio and video range or even unlimited range using VPN-secured mobile networks.
1.2KG Payload Capacity
The DeltaQuad can carry payloads up to 1.2KG, ranging from thermal sensors to high-resolution cameras and multi-spectral imaging.
Weather Resilient
The DeltaQuad Pro is a hardy and resilient aircraft. Smart technology gives the platform the unique ability to safely fly in rain and snow.
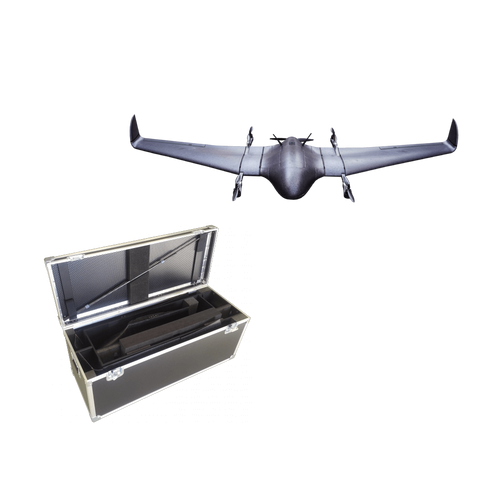
Rapid Field Assembly
The DeltaQuad Pro is shipped in an easy-to-handle box and the aircraft can be assembled in the field in under two minutes.
European Manufacturing
The DeltaQuad Pro is manufactured in The Netherlands. Its combination of flight autonomy, high endurance and vast payload capacity make it a reliable and effective commercial fixed-wing solution.